About me
I am currently a master student in Robotics at EPFL, Switzerland. I am working as a research assistant at BioRob on deep learning methods for furniture skeleton localisation, which is a continuation to my semester project on Omnibot: Mobile furniture baseline development supervised by Prof. Ijspeert, Dr. Bolotnikova and Dr. Crespi in Fall, 2021. In Fall 2020, I conducted my semester project at Ramdya Lab on improving an automated system for optogenetic experimentation supervised by Prof. Ramdya, Dr. Lobato and Dr. Morales.
I received my double bachelor degree in Mechatronics Engineering from Tongji University, China and University of Applied Sciences Aachen, Germany. During that period, I worked on automatic real & synthetic 6D-pose detection dataset generation with Prof. Kallweit, Heiko Engemann and Intelligent Industry 4.0 with Prof. Nan Xie.
“Instead of codes that are only survivable on a computer, I prefer my efforts to be shown vividly beyond the screen.” For this reason, I didn’t specialize in algorithms or coding only but managed to get down to real robots and to be interdisciplinary. My main research interest is in incorporating state-of-art algorithms to help robotic system perceive human behaviours and react smartly and interactively, which is crucial for social and service robots.
Projects
(Ongoing) Deep learning method for mobile furniture skeleton localisation
Extending Omnibot into swarm robotic framework and improving localisation with OpenPifPaf furniture skeleton detection network.

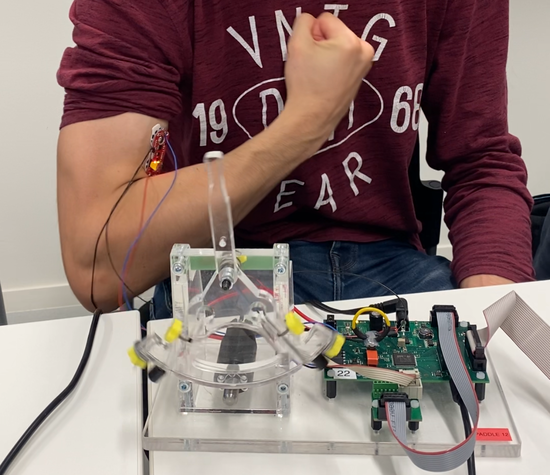
(Ongoing) Human-robot tandem race
Guide an autonomous driving car to follow patterns in noisy environments.
U_Cite: America politician network analysis based on Quotebank
An American politician network analysis based on 270k political mentions filtered from 235 Mio. quotations in Quotebank.
FPGA master unit design for LT24 Display on DE0-Nano-SoC
Design of a LT24 LCD controller interface on Intel FPGA.

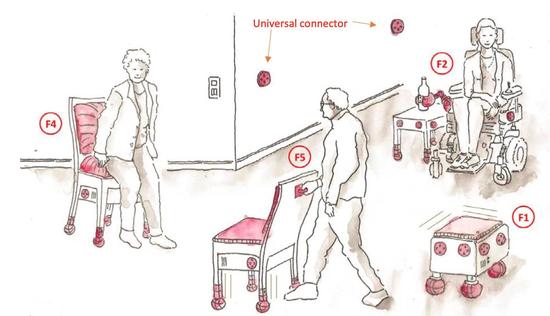
Omnibot: Mobile furniture baseline development
Development of a mobile robot that drives furniture around. Includes mechanical adaptation, electronics design, interactive control (program, gesture, voice) and Android application development.
Basic mobile robot design with Thymio
A minimal design for a full mobile robot system on Thymio with vision, localisation, global/local navigation and filtering.
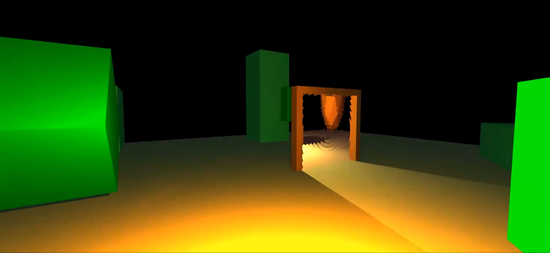
Multi-dimensional portal rendering with WebGL
A playable scene with a portal connected to 3 different worlds, the portal connection switched looking away from the portal.
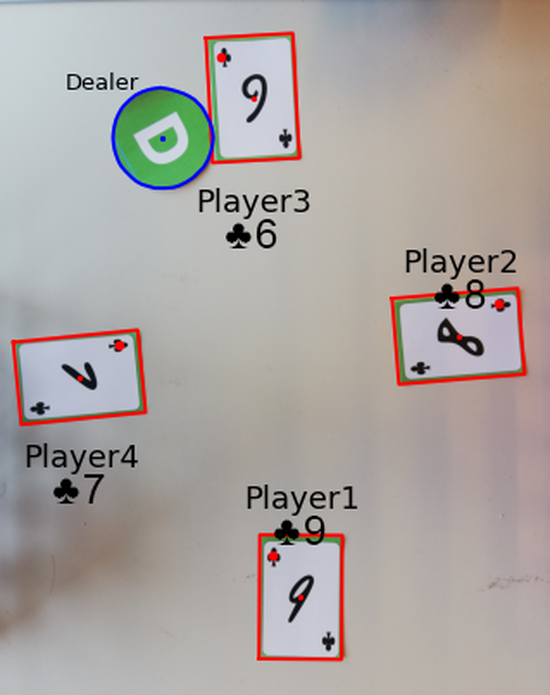
Automatic Poker Game Referee
Intelligent referee to judge poker game winner from overview snapshots.
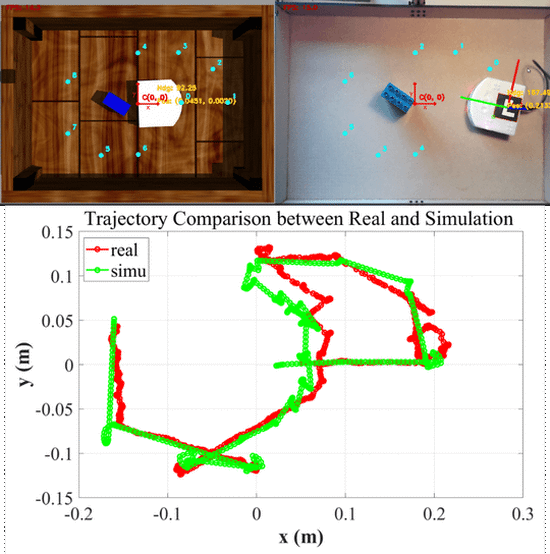
Sim2Real Development for Thymio with ROS
Implemented autonomous navigation with obstacle avoidance of the Thymio-II robot from simulation in Gazebo to real-world tests.
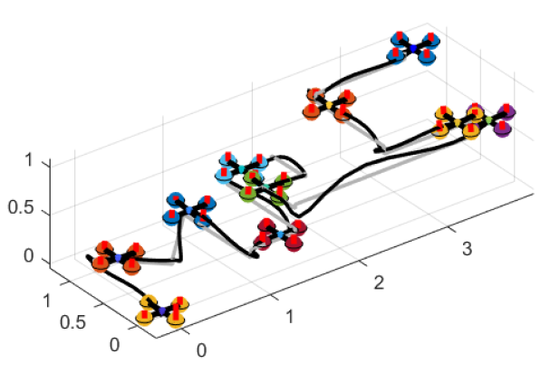
MPC Control of Quadcopter
Simple MPC and NMPC design for a quadcopter in Matlab with Gurobi and Casadi solver.
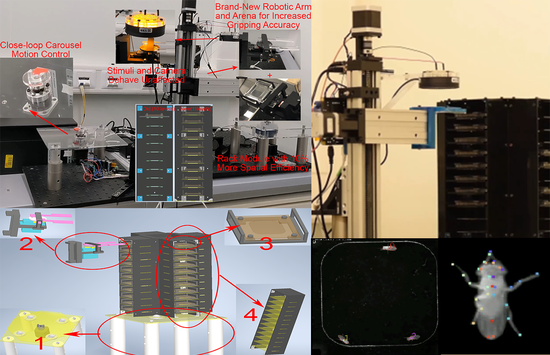
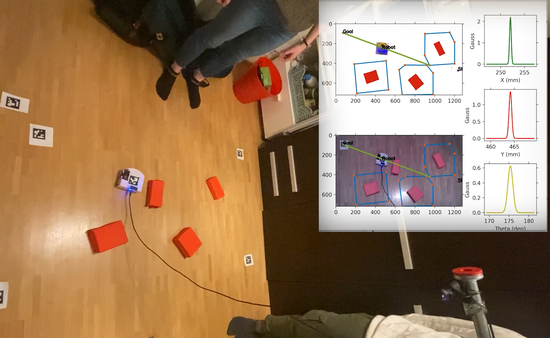
Improvement on Optobot - an Automated system for Neurogenetics Experimentation
Improvement of an automation system that helps with neurogenetics experimentation. Includes mechanical design, control process programming and data analysis with computer vision and neural networks.
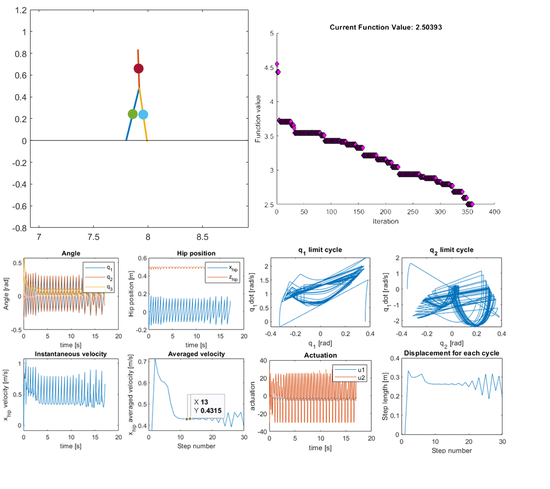
CPG Control of three-link biped walker
CPG controll for a three-link biped walker locomotion in Matlab simulation.
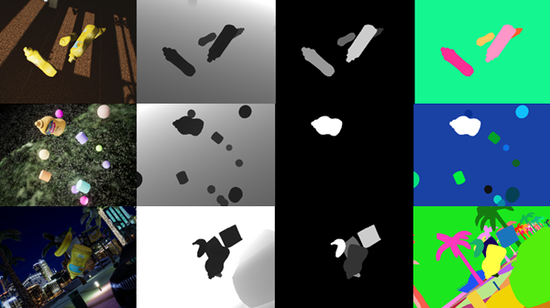
AutoSynPose: Automatic Generation of Synthetic Datasets for 6D Object Pose Estimation
A pipeline for the generation of synthetic datasets with high object variance for 6D object pose estimation that enables a completely automated generation process based on predefined settings.
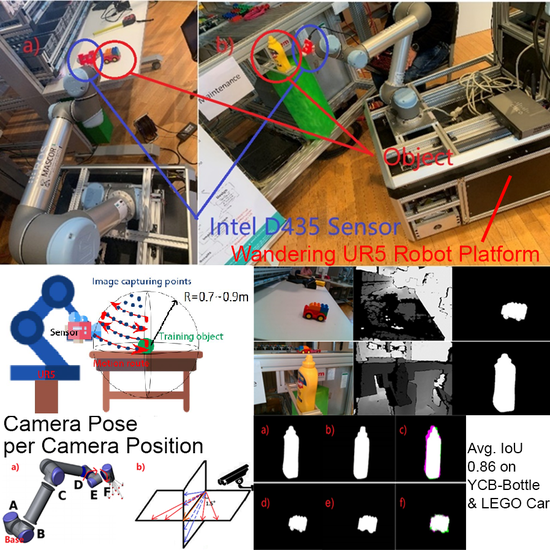
Automatic 6D Pose Detection Dataset Capture with UR5 Robot
Control a UR5 robot on a mobile platform to wander around objects of interest to take images for generating 6D pose detection dataset.
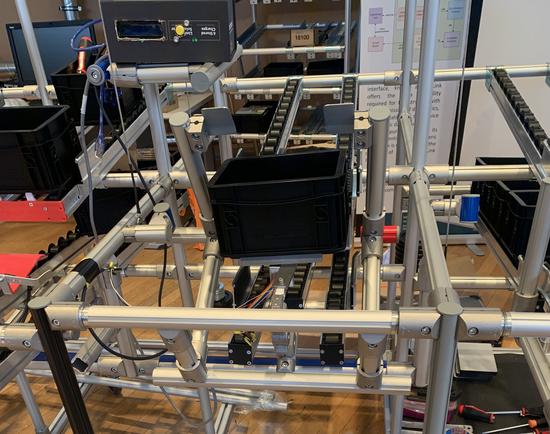
Digitales Karakuri-Intelligente Wägesystem (auf Deutsch)
Umbauen eines mechanischen Karakuri Systems in einem digitalen System, das bei der Aufgabe Teileverpackung hilft.
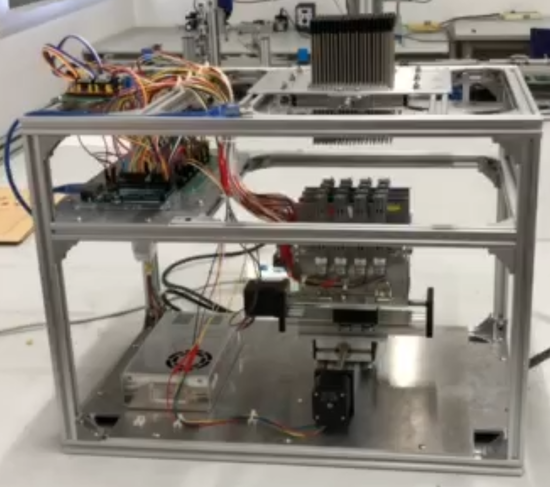
Pin matrix support mechanism for 3D printing
An automation system to form a complemntary shape for less-supported shape in 3D printing.
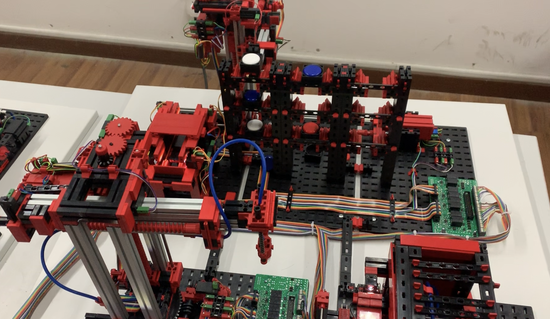
Fischer Intelligent Factory 4.0 Automation
Process control of intelligent factory model with SIEMENS PLC S1500.
{kind=link}