Chuanfang Ning
Chuanfang Ning
About
CV
Projects
Contact
Light
Dark
Automatic
Mechatronics Robotics
(Ongoing) Deep learning method for mobile furniture skeleton localisation
Extending Omnibot into swarm robotic framework and improving localisation with OpenPifPaf furniture skeleton detection network.
Omnibot: Mobile furniture baseline development
Development of a mobile robot that drives furniture around. Includes mechanical adaptation, electronics design, interactive control (program, gesture, voice) and Android application development.
PDF
Slides
Videos
Basic mobile robot design with Thymio
A minimal design for a full mobile robot system on Thymio with vision, localisation, global/local navigation and filtering.
Video
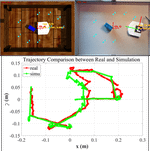
Sim2Real Development for Thymio with ROS
Implemented autonomous navigation with obstacle avoidance of the Thymio-II robot from simulation in Gazebo to real-world tests.
PDF
Code
Video
Improvement on Optobot - an Automated system for Neurogenetics Experimentation
Improvement of an automation system that helps with neurogenetics experimentation. Includes mechanical design, control process programming and data analysis with computer vision and neural networks.
PDF
Slides
Video
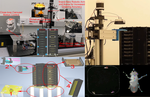
Automatic 6D Pose Detection Dataset Capture with UR5 Robot
Control a UR5 robot on a mobile platform to wander around objects of interest to take images for generating 6D pose detection dataset.
Code
Video
Cite
×