 Omnibot driving furniture in arena during interactive control test
Omnibot driving furniture in arena during interactive control test
Semester Project 2021 Fall at BioRob and Reconfigurable Robotics Lab with 6.0/6.0.
This project is funded by the CIS Research Pillar, Intelligent Assistive Robotics Grant.
Project Goal
The project aims at extending an Omni-directional Drive Robot Platform from scratch to a fully functional mobile robot that can drive furniture around according to user needs. The project includes 4 parts:
- Mechanical part:
- Design and implement attachment-configuration from the robot platform to various kinds of furniture.
- Extend the platform modules according to user demands (Bluetooth, LED, sensors).
- Electronic part:
- Extend the default board coming with the robot platform from a limited stand-alone system to a system allowing for interactive control and module extension.
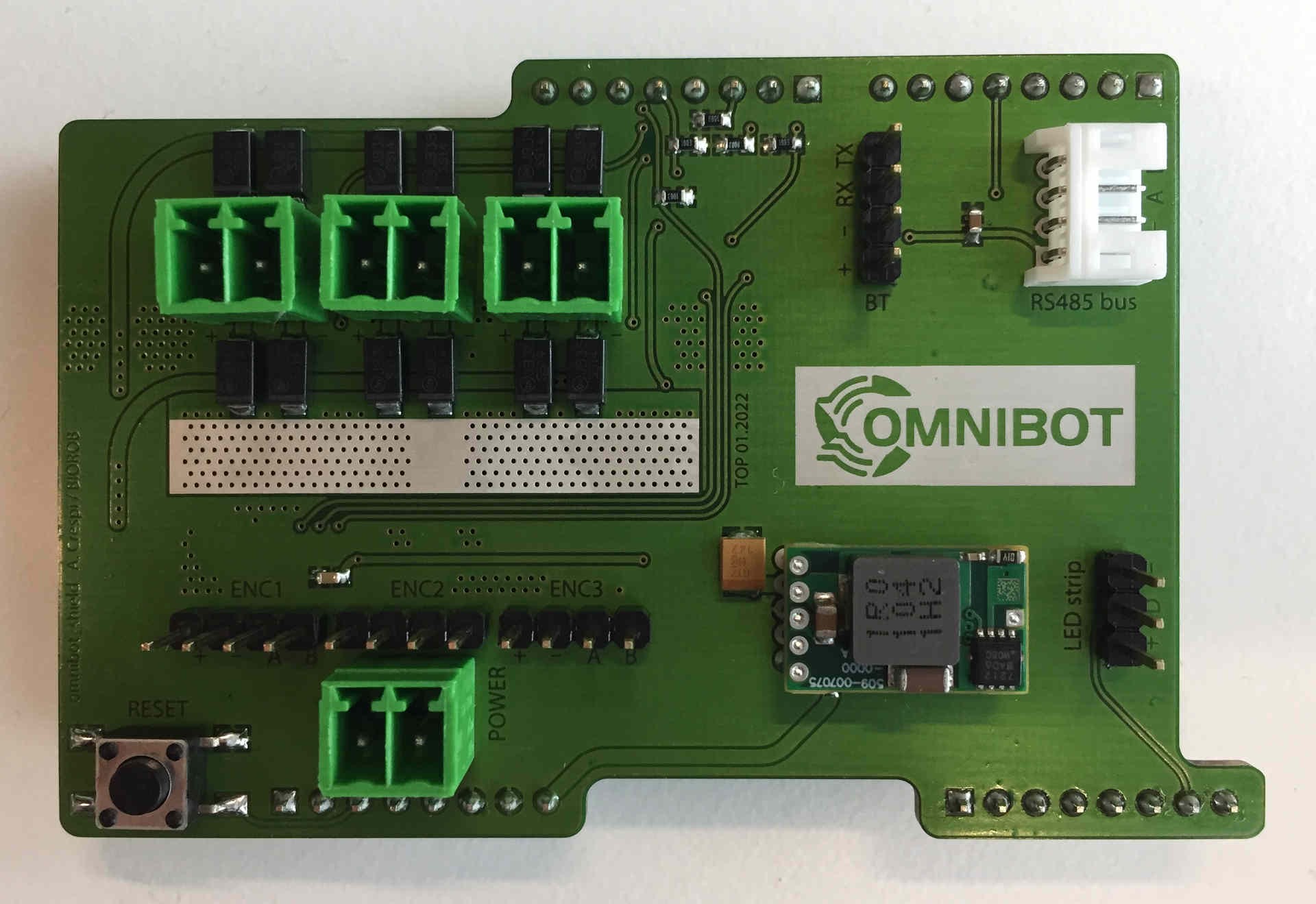
- Optimizing the circuit design with our custom PCB.
- Implement the teleoperation of sensors/actuators on the robot platform with ROS_Serial via Bluetooth.
- Algorithm part:
- Real-time localisation with Optitrack.
- Navigation with simplified visibility graph and A*.
- Interactive control including program, voice and gesture interfaces.
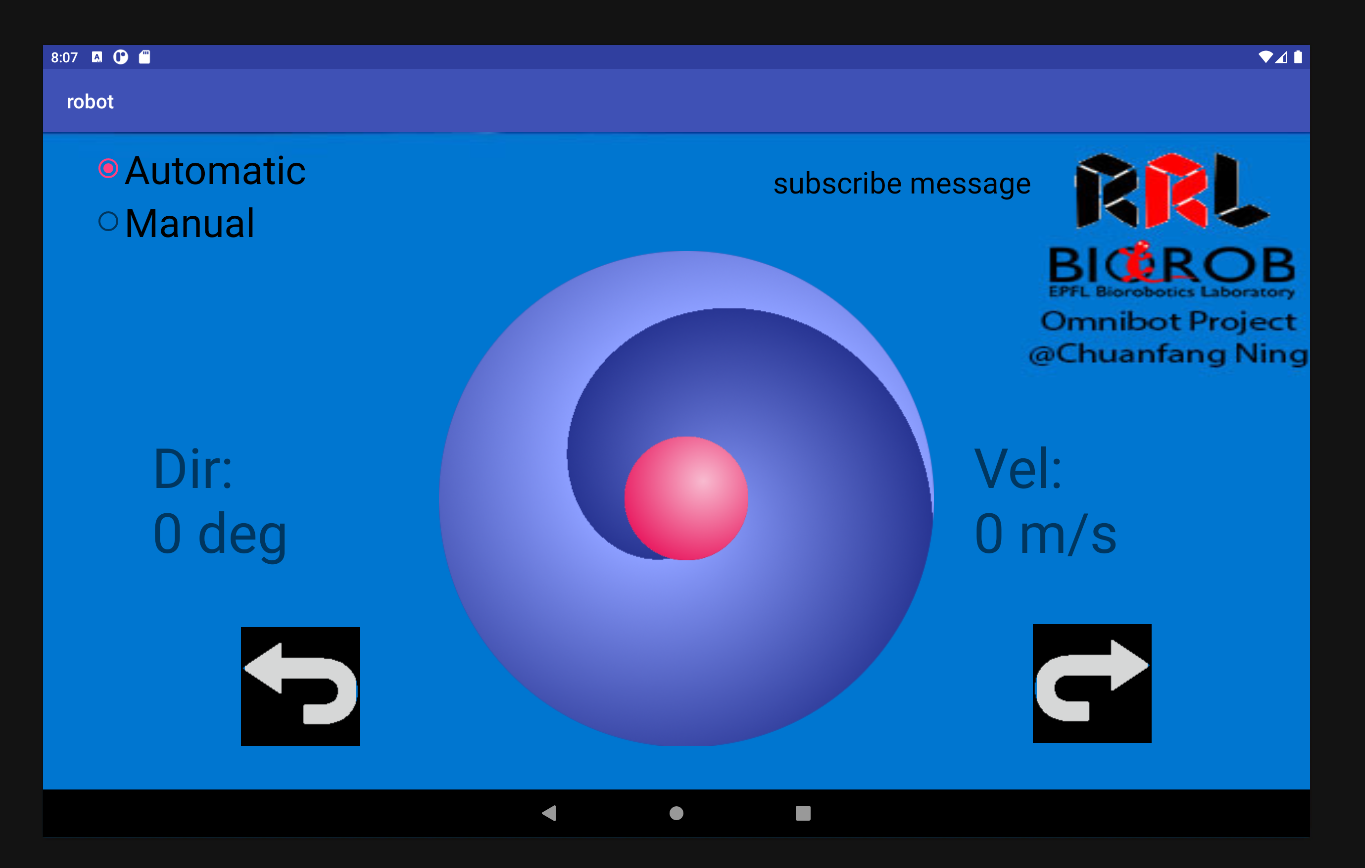
- Android application development for mobile furniture remote control.
Project repo archived at internal Gitlab (requires EPFL access).
The Android application control interface with joystick and buttons.
Update 2022-02: Our custom PCB arrives!
Demo playlists: