AutoSynPose: Automatic Generation of Synthetic Datasets for 6D Object Pose Estimation
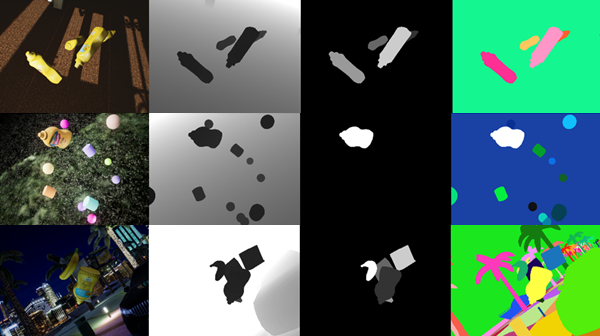 Samples of generated dataset
Samples of generated dataset
Supervisor: Prof. Stephan Kallweit, Heiko Engemann
This project is a continuation to my semester project: Automatic 6D Pose Detection Dataset Capture with UR5 Robot. We extended our real-world dataset generation pipeline by adding a parallel synthetic dataset generation pipeline, which allows us to improve the performance of our object detection model by combining synthetic and real-world data.
We used Unreal Engine 4 to generate a 6D pose detection dataset: AutoSynPose with 6 Mio. subsegments for 5 YCB objects using 97 rendering locations in 12 different environments.
This is done by extending the open-source NVIDIA Deep learning Dataset Synthesizer (NDDS) plugin by
- extending the domain randomization from stochastic distractors to rigid bodies( roughness, specular, metallic and HUE shift).
- extending the stochastic distractors with realistic distractor set (YCB objects)
- adding realistic collision and gravity feature
- adding automatic perspective randomization
- logging domain randomization parameters and enabling clustering of big dataset into sub-datasets accordingly.
Demo:
More details to be found in our paper.