MPC Control of Quadcopter
Final project for ME-425 Model Predictive Control
Lecturer: Prof. Colin Jones
- MPC controller design in matlab with Gurobi and Casadi optimizer.
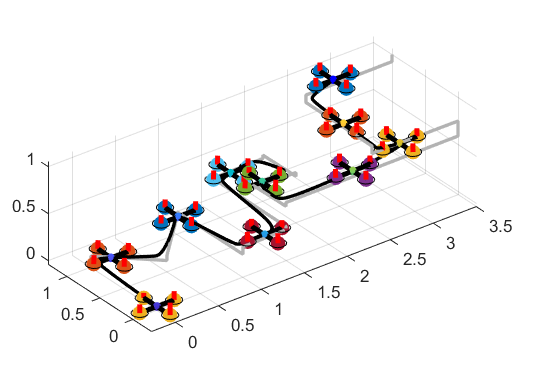
- linear MPC for decomposed quadcopter systems
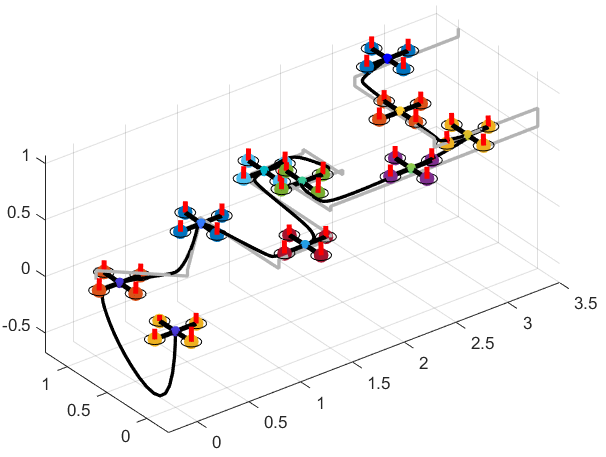
- offset-free MPC tracking regulator in case of fluctuating quadcopter mass
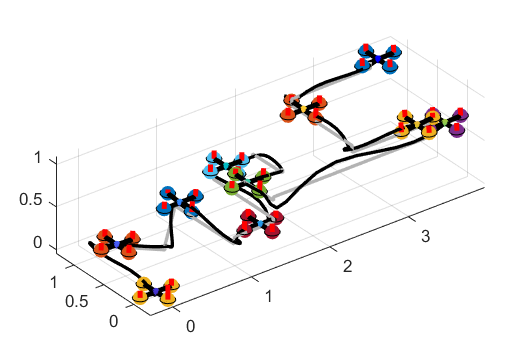
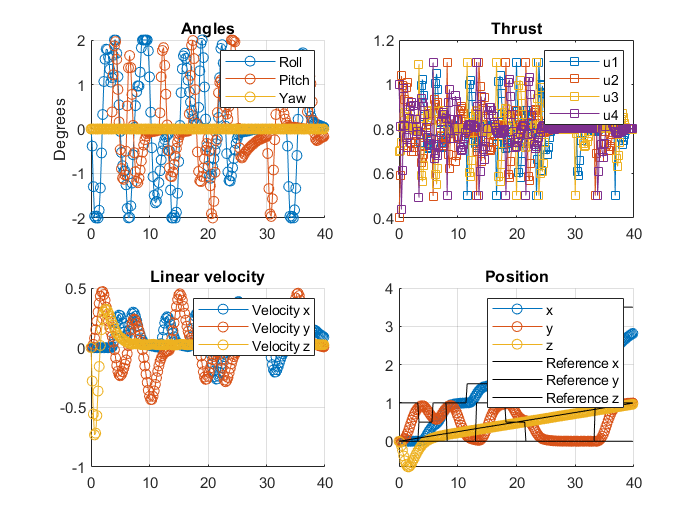
- non-linear MPC for integral quadcopter system
|
|
|
|
|