EMG Control of haptic paddle
Final project for MICRO-553 Haptic human robot interfaces
Students: Chuanfang Ning, Dorian Bignet
Lecturer: Prof. Mohamed Bouri
Supervisor: Dr. Evgenia Roussinova
The aim of this specialization project is to design and implement a control strategy allowing a user to control the haptic paddle through the contraction of a muscle, which is recorded by electromyography (EMG). The lab specialisation includes:
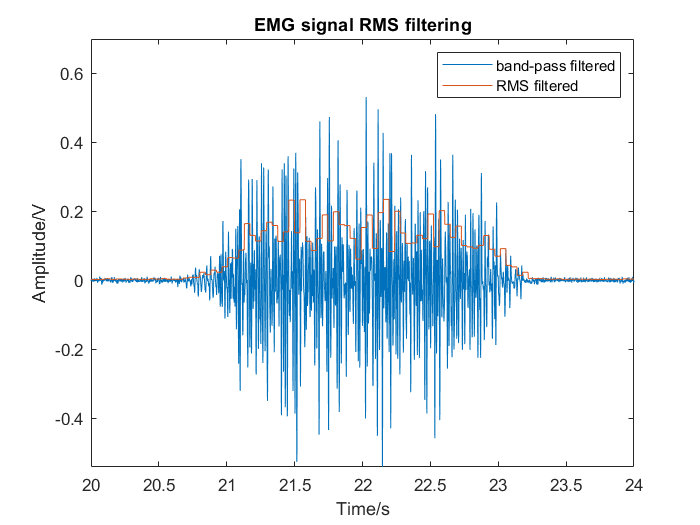
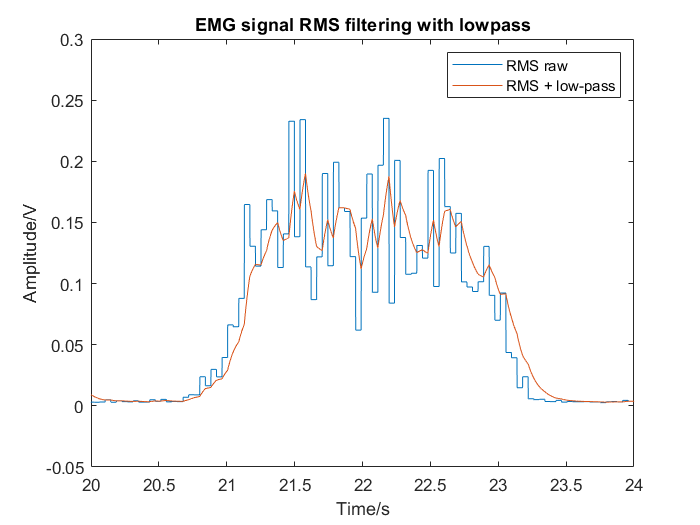
- processing and filtering of raw EMG signal
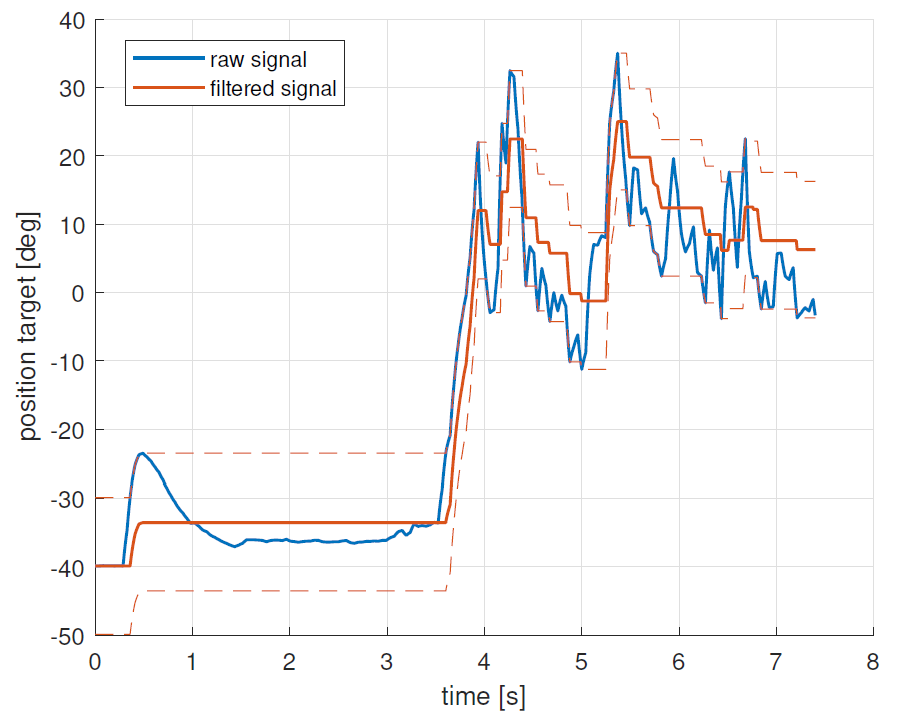
- developing EMG control strategies of haptic paddle
- applying the control strategies to 3 different application:
- Assistive use case: facilate human in strength tasks
- Rehabilitation use case: reinforce muscle fibers and help reinnervation after a stroke
- Grasping use case: combined position & torque control for hand prosthesis
More details can be found in the report.
|
|
|
|
|